Does RGB LiDAR (Light Detection And Ranging) effectively compete with LASER LiDAR?
The Bloch Cancer Memorial in Downtown Boise-with its assortment of shapes and surfaces-serves as a superb test site for comparing LiDAR species. LiDAR itself is monstrously complex; technology has refined operations to little more than pushing a button or three, but that simplicity masks prodigious foundational science and has generated an unfortunate canon that “LiDAR is LiDAR” and that its conclusions are de jure trustworthy.

The exquisite accuracy of LASER LiDAR has lent other species of LiDAR false credentials and prompted colored research results from various manufacturers that-not surprisingly-finds in favor of their interests.
The following 2D representation of a LASER LiDAR survey was collected with a NIST-traceable FARO X330 (≈$60,000) and processed using standard techniques in FARO’s proprietary SCENE 6.x application. It was collected by an experienced forensic operator sensitive to surface shapes and materials. Scan registration was accomplished without targets (a cloud-to-cloud algorithm). 6 scans were used and in the resulting Project Point Cloud a Mean Scan Point Tension (3σ) of ≈4mm was realized. Collection time was ≈75 minutes with RGB supplementation. Exemplar cost of point cloud production: $800 (2016).

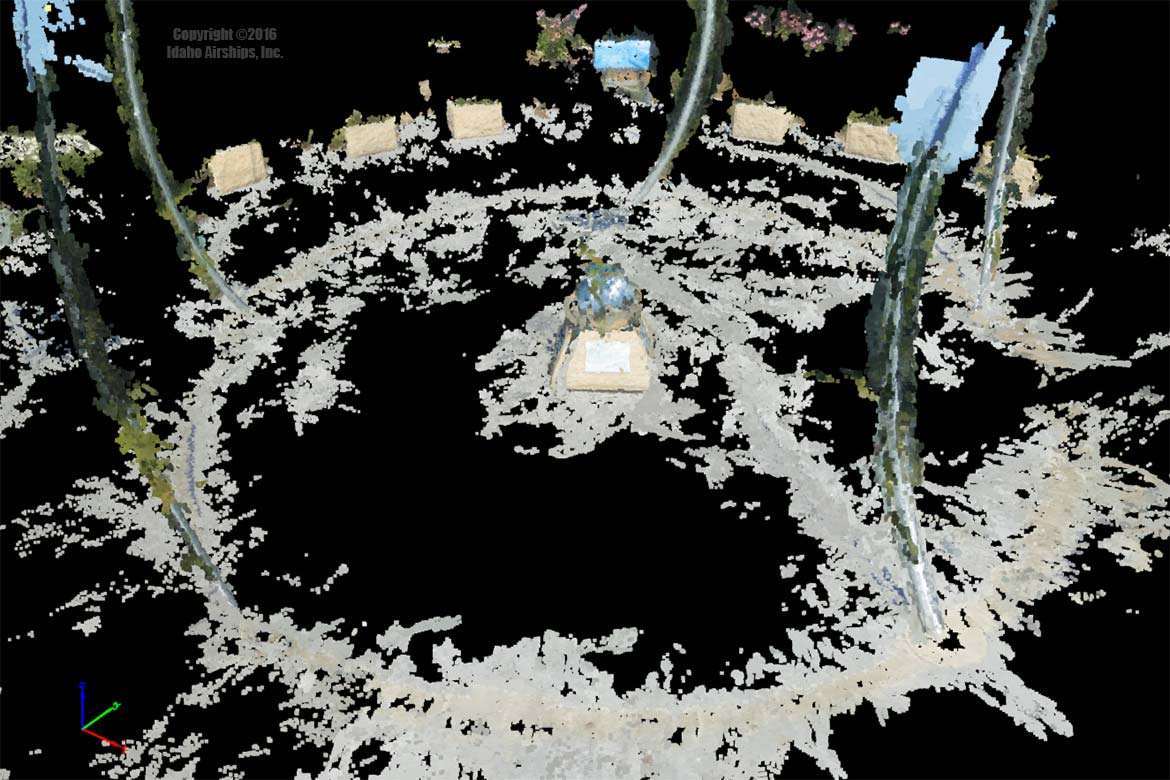
The following 2D representation of an RGB survey was collected with a manually focused Canon 1DsMIII 21.8MP DSLR ($8,000) and Sigma 50mm 1.4 DG HSM with a single B+W UV 2C 010 filter ($1000) by an experienced professional technical photographer, and imagery was processed by an Adobe Certified Expert in Photoshop®. 24 images were used in a professional grade RGB point cloud generation software application. Collection time was 5 minutes. Exemplar cost of point cloud production: $400 (2016).
The following 2D representation of an RGB survey was collected with an automatically focused Olympus TG-4 ($400) by an experienced professional technical photographer, and imagery was processed by an Adobe Certified Expert in Photoshop®. 24 images were used in a professional grade RGB point cloud generation software application. Collection time was 5 minutes. Exemplar cost of point cloud production: $300 (2016).
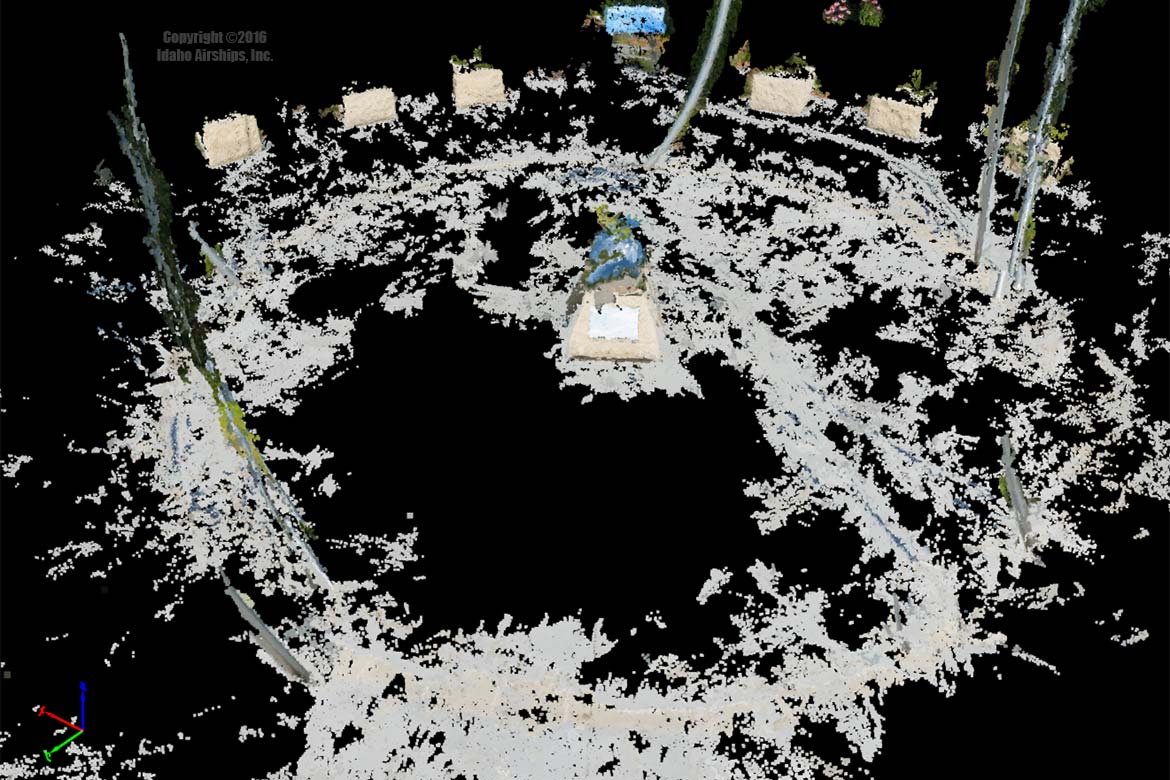
The following 2D representation of an RGB survey was collected legally by an RPV (Remotely Piloted Vehicle) operator with nearly 20 years experience in RPV imaging, who is also a Master Aerial Photographer, using a DJI Inspire 1 equipped with a Zenmuse X3 gimbal and camera (≈$3400, 2016), and imagery was processed by an Adobe Certified Expert in Photoshop®. 53 images were used in a professional grade RGB point cloud generation software application. Collection time was ≈30 minutes. Exemplar cost of point cloud production: $750 (2016).

This is hardly an exhaustive or well-controlled experiment, but that does little to mitigate its relevance to real-world data collections by engineers with limited digital imaging expertise, or by competent technical imagers (who would ideally provide substantial competencies in physical and geometric optics).
It is acknowledged that this is also an extremely hostile subject to SfM and LiDAR praxis.
Conclusions:
- The Point Density of the LiDAR product is far greater than of RGB sources. The relatively sparse details in the RGB collections are not prohibitively objectionable when considering the advantages of RGB collection: no requirement for expensive/esoteric equipment, and extremely rapid, economical production.
- The porosity and artifacting in the RGB datasets are aesthetically objectionable in any but coarse of visualizations-but again, the rapid and inexpensive production isn’t expected to replicate the virtues of terrestrial LASER LiDAR.
- The differences between the $8000 Canon (plus $1000 lens) and the $400 Olympus are-in this test-negligible, but that may be due to the limiting effects of the point cloud processing; the differences in image quality is quite apparent when expertly critiqued. The Olympus is a top-echelon rugged, compact camera, far outperforming its price point of <$400.
- Phantom points (from edge effect) are removed from the reflective sphere and kite poles in the LiDAR data set during filtering. In the RGB datasets there are obvious fringes from background trees around various (usually abrupt) shapes; those trees are actually ≈50′ distant from the poles.
- Non-Lambertian surfaces contribute to gross errors in RGB products, but it is necessary to point out that the same happens with LASER LiDAR, but the LASER data is filtered during processing to remove varieties of noise.
- The dataset voids on the ground in the ground-based RGB collections are exactly what we’d expect from severe obliquity and “shadowed” (by foreground objects) areas in the field. The data density in those same areas by the sUAS speaks well to the advantage of even modest elevation of the camera. The LiDAR linear (ranging) accuracy parameter of +/-2mm, stepping of as little as .009°, and ≈2.5mm Ø beam effectively deals with this problem even in the relatively far field.
- For application in which accuracy is required, such as BIM/As-Built, forensic metrologies, high grade visualization, and especially when synthetic shapes and non-Lambertian surfaces are involved, the LASER LiDAR is mandated. For more coarse metrologies, when speed and cost are critical, and where organic shapes and surfaces are dominant (such as canyons, open mines, etc.) RGB point cloud production should be satisfactory-and this is corroborated by its widespread use for such applications.
- Photographically-generated point clouds may be a profound liability in a forensic/contentious or other otherwise critical application.
Note: On 10/26/16 SPAR3D published this article corroborating our conclusion.
Note: On 5/10/17 SPAR3D published this article further corroborating our conclusion.
Note: As of 6/1/17 SkyCatch publicly acknowledged that common sUAS’s produce 30cm-5m mapping inaccuracies without GCP’s. Comparisons of this result to terrestrial LASER LiDAR output is problematic but the magnitude of differences negate other concerns; 3 millimeter LASER LiDAR tensions are volumetrically tens of millions of times more accurate than even 1 meter inaccuracies (let alone 2-5 meter inaccuracies).
L
Photoshop® is a registered Trademark of Adobe Systems, Inc.



